ECE4960-2022
Course on "Fast Robots", offered Spring 2022 in the ECE dept at Cornell University
This project is maintained by CEI-lab
Cornell University: ECE 4960
Lab 6: Closed-loop control (PID)
Objective
The purpose of this lab is to get experience with PID control. The lab is fairly open ended, you can choose to do closed loop control on position or orientation, and you may do so with whatever works best for your system (P, PI, PID, PD). Your hand-in will be judged upon your demonstrated understanding of PID control and practical implementation constraints, and the quality of your solution.
This lab is part of a series of labs (6-8) on PID control, sensor fusion, and stunts, and you will continue to improve on your system throughout these weeks. This week, we will simply aim to get the basic behavior working. While we give you tips for improving the behavior now, if you run out of time, you can optimize more over the coming weeks.
Parts Required
- 1 x R/C stunt car
- 1 x SparkFun RedBoard Artemis Nano
- 1 x USB cable
- 2 x Li-Po 3.7V 650mAh (or more) battery
- 2 x Dual motor driver
- 2 x 4m ToF sensor
- 1 x 9DOF IMU sensor
- 1 x Qwiic connector
Prelab / BLE
No matter which task you take on, it will be essential that you first setup a good system for debugging.
Please attempt to implement this before your lab session
A good technique will be to:
- Have the robot controller to start on an input from your computer sent over Bluetooth
- Execute PID control over a fixed amount of time (e.g. 5s) while storing debugging data in arrays
- Upon completion of the behavior, send the debugging data back to the computer over Bluetooth.
Debugging data may for example include sensor data with time stamps, output from the individual branches of your PID controller, and/or the input that you are sending to your motors. Remember, however, the storage cannot exceed the internal RAM of 384kB. If you plan to do a lot of tweaking of your gains, you can also consider writing a Bluetooth command that lets you update the gains without having to reprogram the Artemis.
Feel free to implement this in the way that works best for you, but we recommend using a callback function in Python to automate data gathering. (Please refer to Lab2 for information on the robot command protocol and the BLE code base.) The following text includes helpful hints to incorporate callback functions in your code:
Here is a reference notebook to give you some ideas.
NOTE: The BLE codebase has been updated on 21 Feb, 2022 (Version: 1.1) to fix a bug (in the Arduino code) related to converting negative float values into a string. Please re-download the codebase or apply (manually or using git) this patch to your old codebase.
You may consider the following best practices:
- Familiarize yourself with the Arduino code structure before you design your robot control architecture.
- Use the
EStringclass and modify it as required. It has most of the low level data handling code. - Beware of buffer overflows when dealing with character arrays (C-strings) in the Arduino code! The
EStringclass utilizes a C-string member variablechar_arrayof size 150. Theappendmember functions are not memory safe! - Refer to the “Global Variables” section of ble_arduino.ino to create new characteristics. You will need to create a corresponding entry in connection.yaml. You are not expected to follow the naming paradigm (“RX_” in ble_arduino.ino has a corresponding “TX_” in connection.yaml) used in the base code.
- Please checkout the Jupyter introduction notebook and/or tutorial (~10 min read)! It will familiarize you with some basic terminology and functionality.
- Always check the FAQ when you get stuck with a problem. For example, it shows you a quick way to generate new UUIDs.
- Your notification function callbacks should perform minimal processing. All you have to do is to store the value and/or time of the event.
- Do not call a “receive_*” function inside the callback handler. It defeats the purpose of the BLE notify functionality.
- Checkout the Tutorials section for primers (python classes, CLI, Jupyter Lab) and other helpful resources.
Lab Procedure
Choose on of the following three tasks. The objective of any of these tasks will be to achieve reliable and accurate, yet fast control. Note that the task you choose in this lab will eventually create the basis of the stunt you can attempt in Lab 8.
Tips and tricks:
- LOG DATA: If you don’t want to repeat work during Lab 7, be sure to log all data (time stamped sensor values and motor outputs), as well as setup variables from at least one successful run.
- Lectures: Brush up on your PID control skills by checking out Lectures 7 and 8.
- PID library: There exist an Arduino PID library. You are welcome to use this library if you prefer, but we will only offer limited TA support if you run into issues. Implementing a basic PID controller from scratch is easy (<10 lines of code), and will give you more freedom in dealing with noise, wind-up, and system non-linearities.
- Start simple: E.g. with a proportional controller running at low speeds and a generous setpoint, then you can work your way up to faster speeds, more advanced control, and more difficult setpoints.
- Documentation: Please clearly document the maximum linear or angular speed you are able to achieve (you can use your sensors to compute this). To demonstrate reliability, please upload videos of at least three repeated (and hopefully successfull) experiments.
- Frequency: Fast loop times means everything to a good controller. Be sure to include a discussion of sensor sampling rate and how this affects the timing of your control loop. Avoid using blocking statements when you can (e.g.
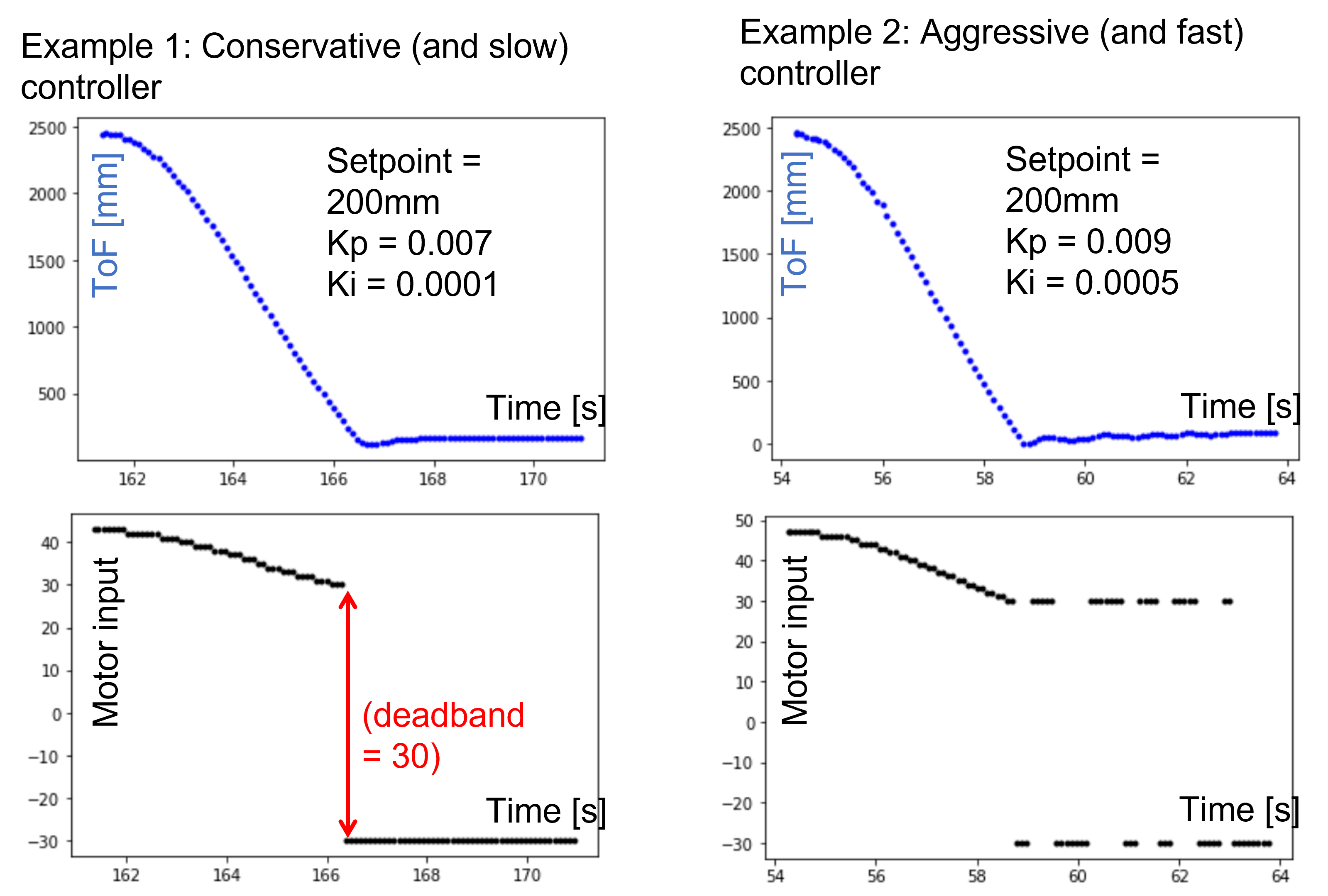
delay()orwhile(sensor not ready) ){wait}). Also, remember that any serial.print/BLE sending that occurs during execution may slow down your loop time considerably. - Deadband: From Lab 5, you should have found the deadband of your motor (the region below which the power to the motors does not overcome the static friction in your system). Consider writing a scaling function that converts the output from your PID controller to an output for which the motors can actually react.
- Wind up: If you include an integrator, consider whether you need to worry about integrator wind-up.
- Derivative LPF: If you include a derivative, consider whether it is necessary to include a low pass filter in the derivative branch.
- Derivative kick: Consider whether the derivative kick can cause any issues, given the task you choose. Here is a great overview on how to eliminate derivative kick: http://brettbeauregard.com/blog/2011/04/improving-the-beginner’s-pid-derivative-kick/
- Anything goes: The goal is a working system. When you have a reasonable control setup working, you should feel free to add any “hacks” that will improve your robot performance in a reliable way. If you don’t have time to implement them, discussing what you imagine would help can still get you grading points.
- Motor drivers: Recall Lecture 6 on Actuators and that the motor drivers have both coasting and active breaking modes. These might come in handy.
Task A: Don’t Hit the Wall!!
For this task, you will have your robot drive as fast as possible (given the quality of your controller) towards a wall, then stop when it is exactly 300mm away from the wall using feedback from the time of flight sensor. Your solution should be robust to changing conditions, such as the starting distance from the wall (2-4m) and the surface (linoleum/carpet). The catch is that any overshoot or processing delay may lead to crashing into the wall.
Beyond the considerations mentioned above, think about the following:
- Given the range of motor input values and the output from your tof sensor, discuss what a reasonable range of the proportional controller gain will be.
- Consider the range and sampling time you choose for your TOF sensor; it may be worth lowering the accuracy for faster updates. Note that the medium range is only available if you are using the (ToF Pololu library).
- Also note that the sensor has a programmable integration time. If this is set too high, you will see large jumps in your data as the robot drives and you can no longer assume that the measurements are independent. You can lower the integration time (trading off accuracy for speed) using:
proximitySensor.setProxIntegrationTime(4); //A value of 1 to 8 is valid. Again this function is only available in the Tof Pololu library.
Below you can see an example of a simple PI controller acting on the TOF signal.
Corresponding videos are here:

 .
.
** NOTE: If you choose this task, your eventual stunt will involve speeding towards the 300mm position (where a small sticky matt will be located), then doing a vertical flip and driving back in the direction from where you came. In this lab you will be limited by sensor sampling rate and you may have to lower the motor speed accordingly. In Lab 7 we will look at sensor fusion as a way to overcome this problem.
Task B: Drift much?
For this task, you will have the robot drive fast forward, then turn with drift to do a 180 degree turn, and return the direction it came from without stopping. The PID controller should be controlling the orientation of your robot by introducing a difference in motor speeds. Before trying to get your car to drift, try controlling the orientation of your car while it is stationary, then introduce a base speed.
Beyond the considerations mentioned above, think about the following:
- How do you get the orientation of the robot? Is there a way to minimize the error introduced by discrete integration of the gyroscope?
- How fast is your robot turning? You may have to check whether you are maxing out the gyroscope. The library will allow you to adjust the range.
- The PID controller should control an “offset” or differential in wheel speed. That way you can control the orientation even if the car is moving at a set base speed.
Below you can see an example of the controller maintaining a constant orientation even when the robot is kicked.

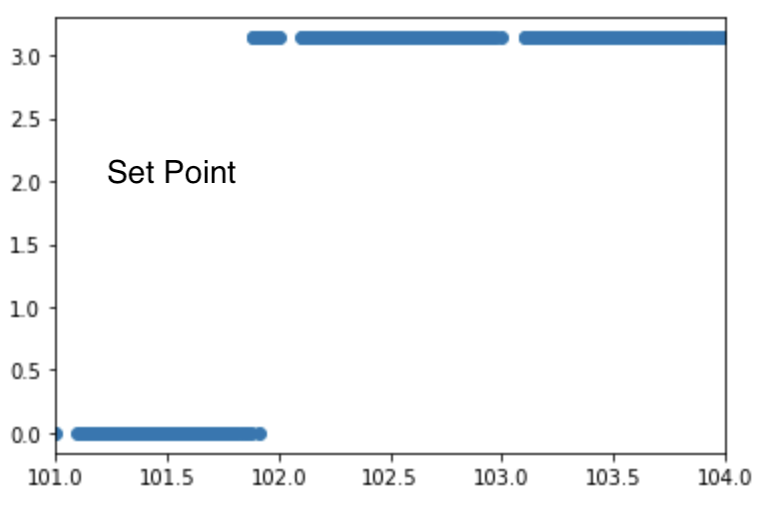
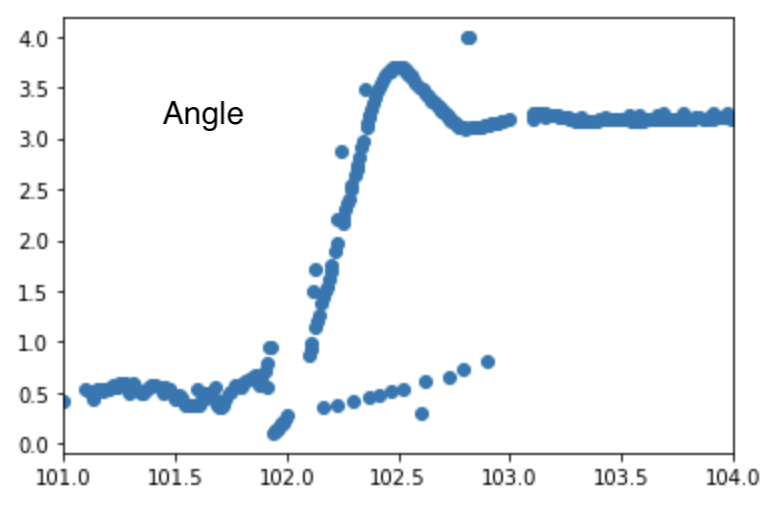
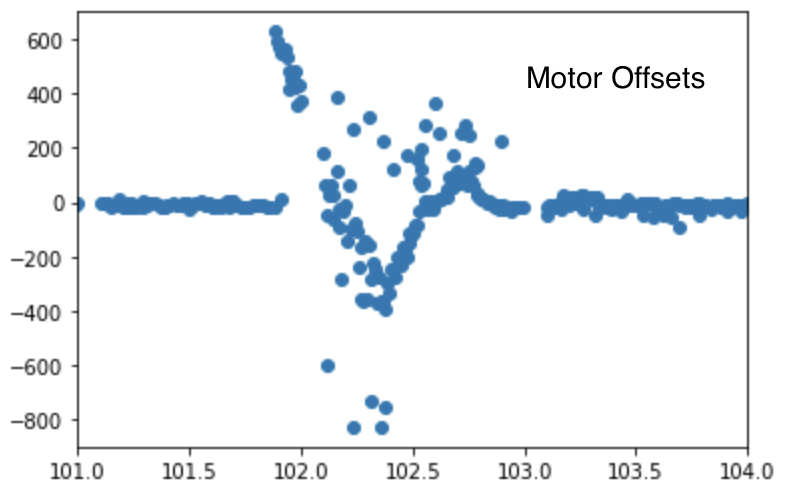
Below is an example of the robot drifting and doing a 180 degree turn as well as graphs of the setpoint, angle, and control signal for the PID controller.

** NOTE: If you choose this task, your eventual stunt will involve speeding towards a wall until you are 800mm out, then turning 180 degrees and driving back from where you came (as fast as possible). Just like in Task A, lab 7 will involve sensor fusion on the time of flight sensor to help you estimate the distance to the wall at a high sampling rate.
Task C: Thread the needle!
For this task, you will have your robot drive as fast as possible (given the quality of your controller) along a wall at a fixed distance of 300mm, given feedback from your time of flight sensor and the gyroscope. You know what the catch is!
Beyond the considerations mentioned above, think about the following:
- Given the range of motor input values and the output from your time of flight sensor, discuss what a reasonable range of the proportional controller gain will be.
- Consider the range and sampling time you choose for your TOF sensor; it may be worth lowering the accuracy for faster updates. Note that the medium range is only available if you are using the (ToF Pololu library).
- Also note that the sensor has a programmable integration time. If this is set too high, you will see large jumps in your data as the robot drives and you can no longer assume that the measurements are independent. You can lower the integration time (trading off accuracy for speed) using:
proximitySensor.setProxIntegrationTime(4); //A value of 1 to 8 is valid. Note that his function is only available in the Tof Pololu library. - Try your solution at different initial conditions (distance from and orientation with respect to the wall). Even small errors in the initial orientation can be hard to correct. Discuss when your controller works well and when it does not, and why.
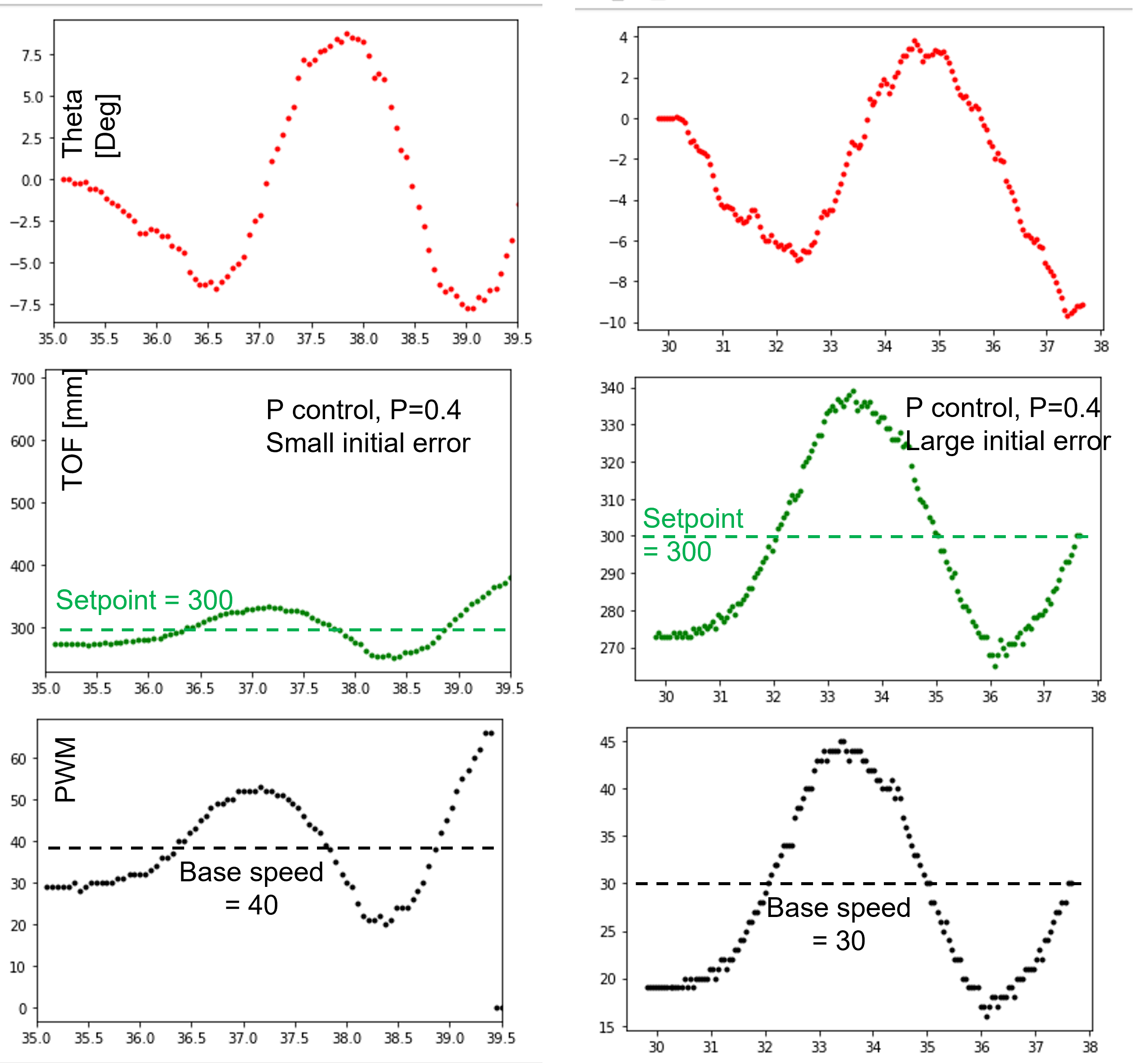
Below you can see an example of a simple P controller acting on the TOF signal from a distance sensor mounted sideways:
Corresponding videos are here:

 .
.
- Try using your gyroscope to improve your controller. Please include graphs similar to the ones shown above to demonstrate that your angle estimation works. Discuss why using the gyroscope for angle estimation does not work well over long runs, and under what initial conditions it will not work. In the next lab, we will examine how to do more robust control.
** NOTE: If you choose this task, your eventual stunt will involve speeding as fast as possible along a wall with a foam figure balancing on top; the goal being to perfectly hit a similarly figure-shaped hole in a perpendicular wall placed at least 2m in front of your starting position.
Write-up
To demonstrate that you’ve successfully completed the lab, please upload a brief lab report (<800 words), with code snippets (not included in the word count), graphs of sampled data, videos and/or photos documenting that everything worked reliably and what you did to make it happen.